I built a high-precision wearable motion capture & rehabilitation assessment system designed for stroke patients to perform home-based rehab training with 3D motion reconstruction.
The system integrates multiple hardware and software technologies, covering multi-IMU sensing, quaternion-based Kalman fusion, wireless streaming (UART), and a PC-side inverse kinematics (IK) evaluation tool (MATLAB + OpenSim) to visualize motion and quantify joint ROM (Range of Motion). The goal was simple: make rehab feedback more objective, more accessible, and easier to use. 🦾
🧩 System Overview
Workflow: Capture → Fusion → Transmit/Store → IK Analysis → Rehab Metrics
- Wearable device captures motion using 9-axis IMU modules
- Firmware performs real-time fusion and outputs limbs angles
- Data is wirelessly (UART) transmitted to PC and also logged to SD card
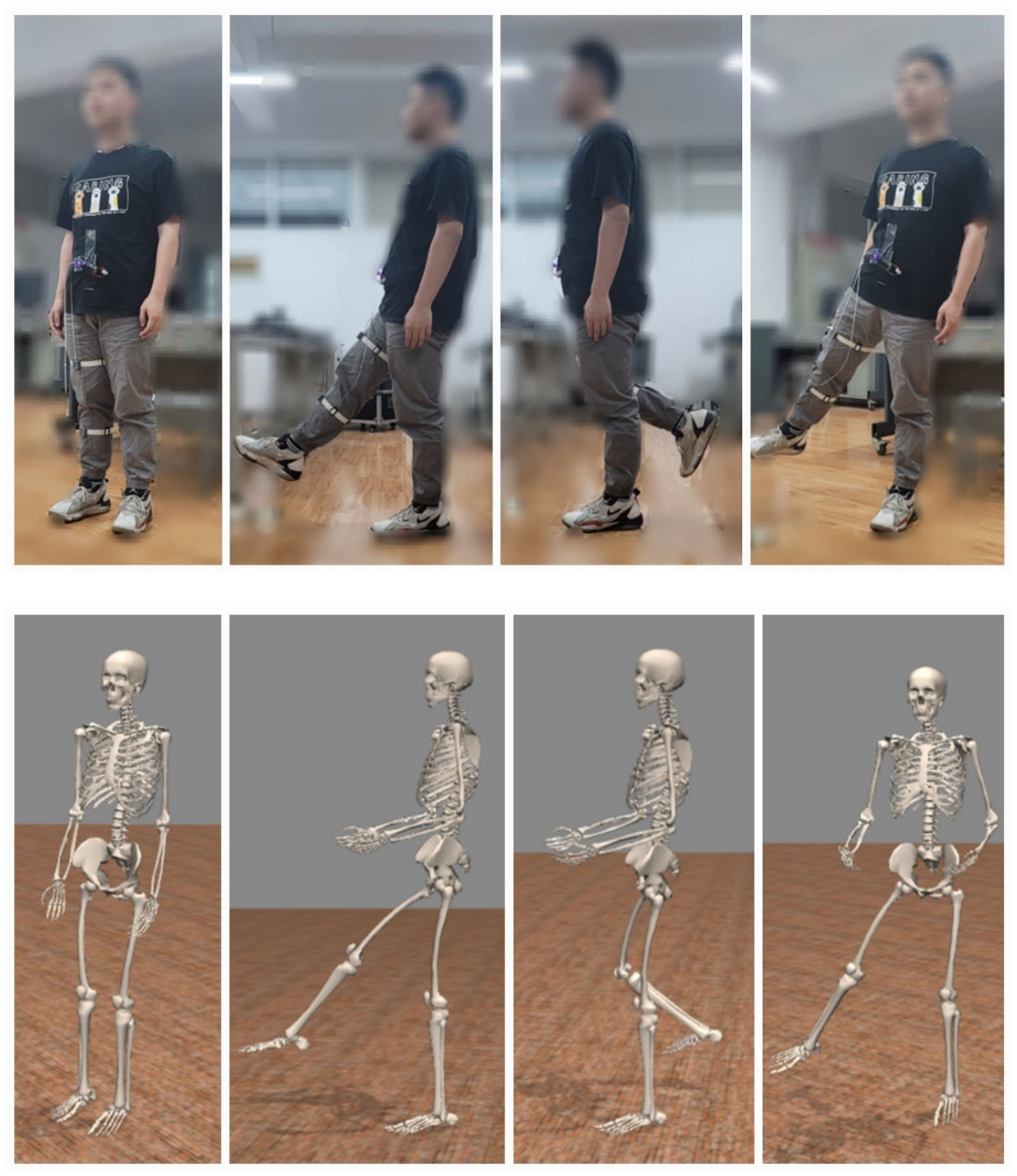
- PC tool performs inverse kinematics Algorithm to replay motion and compute ROM metrics
🧠 Software Development
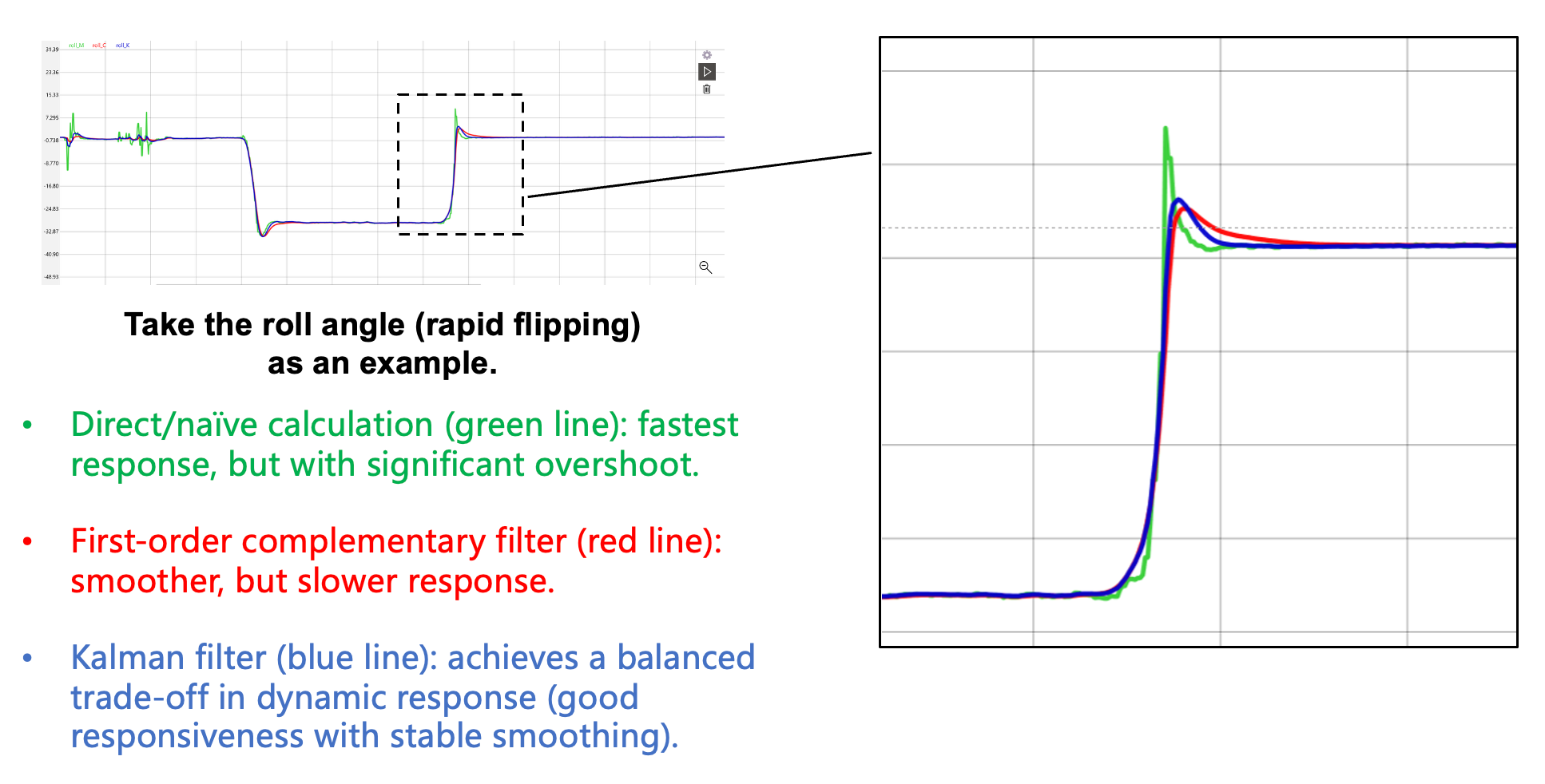
Kalman Filtering Algorithm
- Implemented a Quaternion-based Kalman Filtering algorithm to fuse data from accelerometers, gyroscopes, and magnetometers, effectively solving Euler angle gimbal lock and sensor drift issues.
- Developed the embedded firmware in **C/C++**on the STM32L0 platform, managing task scheduling and low-power operation.
- Built a host analysis system using MATLAB to perform Inverse Kinematics (IK) Algorithm. This allows for precise reconstruction of limbs motions based on sensor data.
- Ported the FATFS file system to enable high-speed, real-time offline storage of motion data onto an SD card via the SDIO interface.
⚙️ Hardware and Mechanical Design
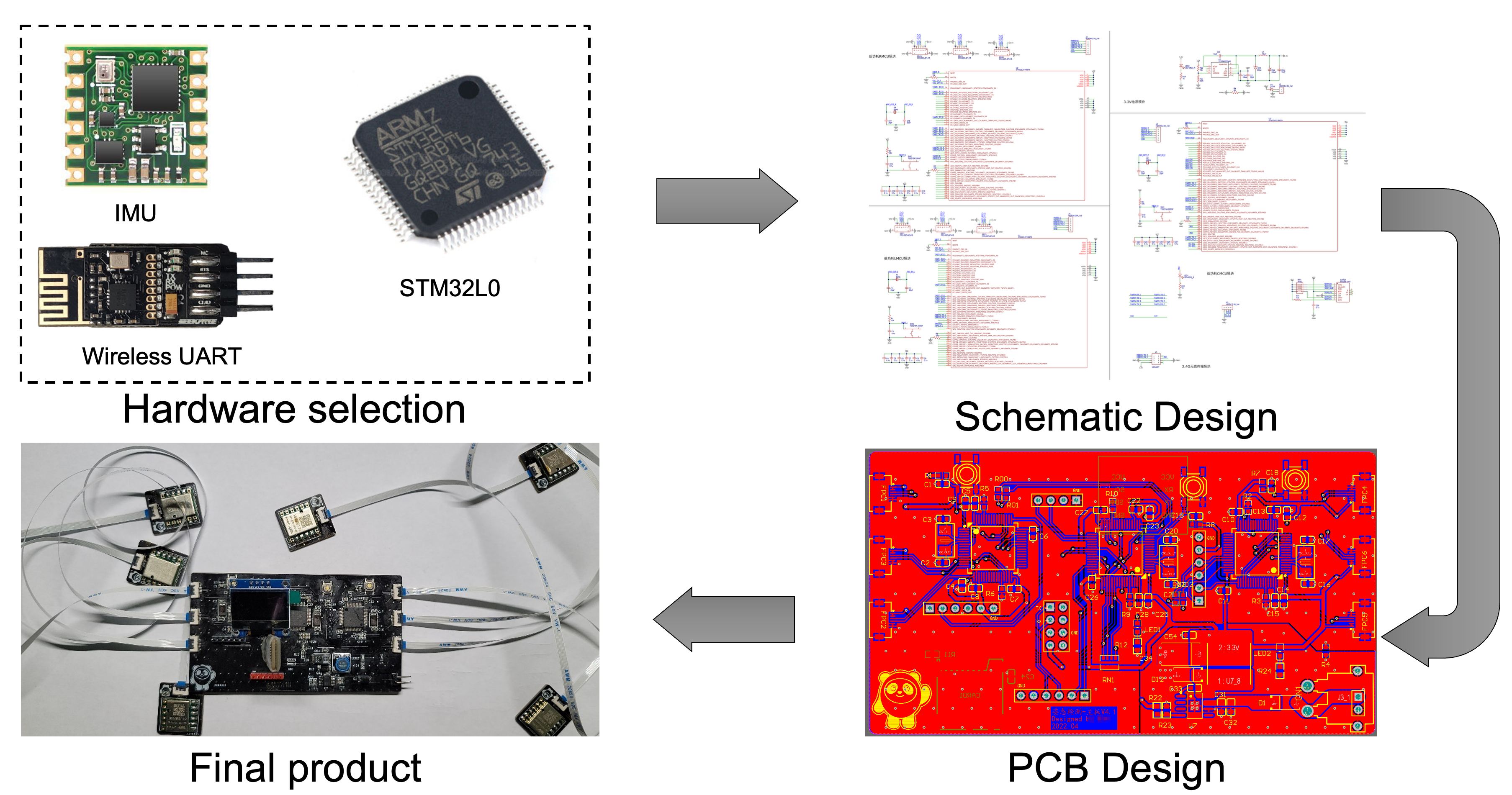
Hardware Workflow
Designed a distributed hardware architecture using three STM32L071 (Low Power) MCUs. Two units act as sensor nodes (processing IMU data), while the central unit handles data aggregation and transmission.
Designed custom PCB boards integrating TPS5430 power management for stable voltage regulation and signal isolation to prevent digital noise from affecting analog measurements.
Integrated a 2.4G wireless transmission module (NRF24L01 based) to replace traditional wired connections, allowing patients unrestricted movement range during rehabilitation exercises.
Modeled and manufactured 3D-printed PLA enclosures using Fusion360. The design features a magnetic slide-lid mechanism and ergonomic strap mounts for easy patient wearability. (Thanks for my best friend Ruizhe Zhou’s helps!)
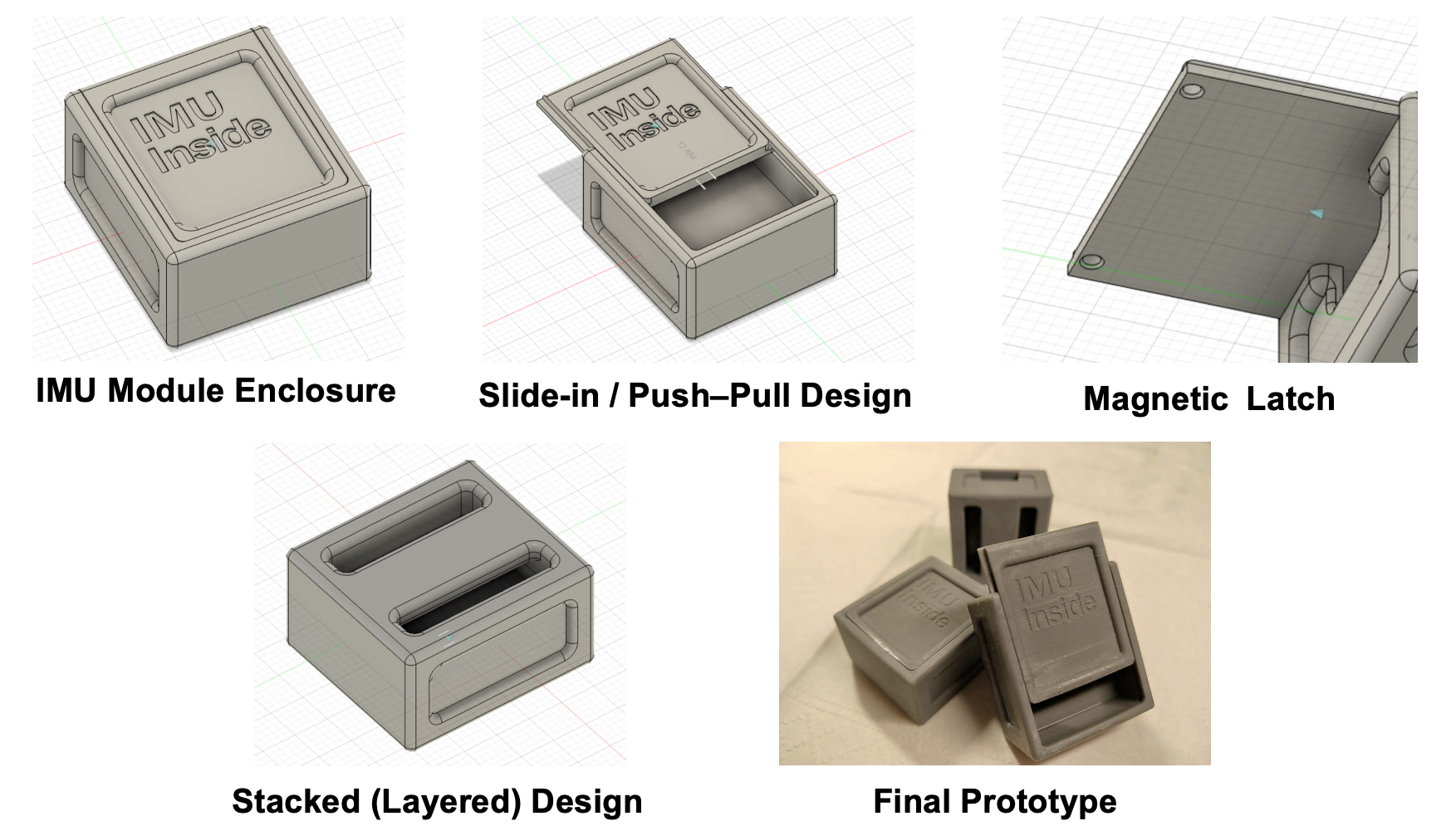
3D-printed PLA enclosures
💡 Key Innovations
- The system achieves an average knee joint angle measurement error of only 3° through rigorous static and dynamic testing, meeting high accuracy.
- Inverse Kinematics Integration: Unlike simple angle measurement devices, this system utilizes motion capture data for inversion. This provides doctors with clinically relevant Range of Motion (ROM) data for remote diagnosis.
- The system focuses on home-based rehabilitation. It is lightweight, wireless, and includes a “push-pull” magnetic switch structure designed specifically for ease of use by stroke patients.
📸 Project Gallery
Prototype

Overhead view of the Wearable Device
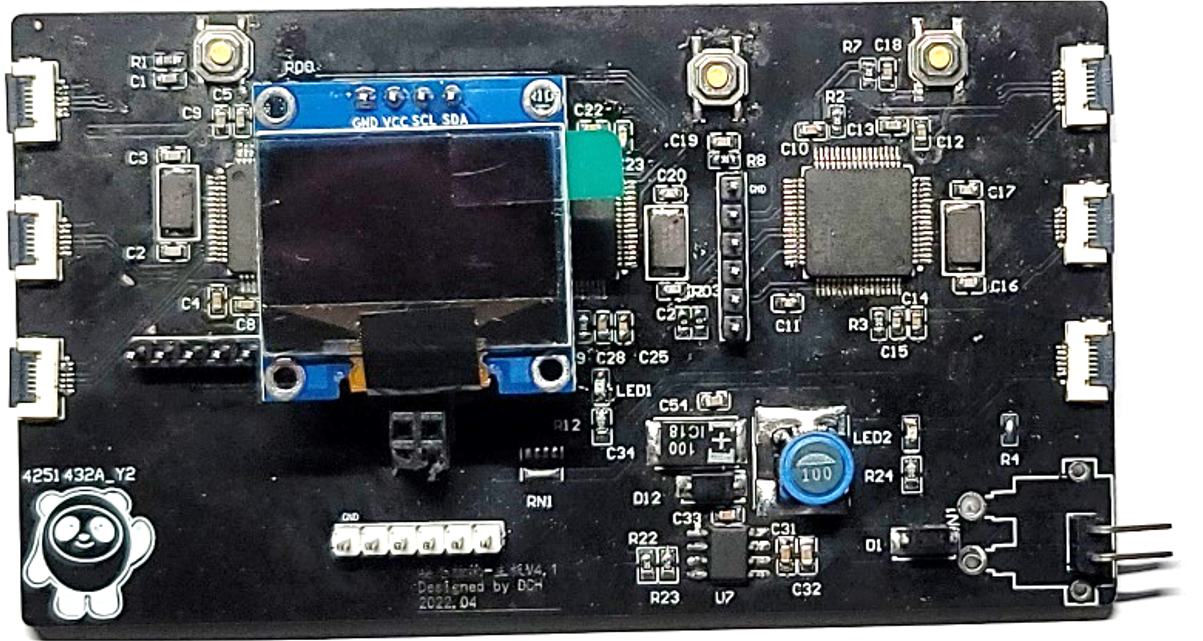
Hardware PCB

Angle Test
🎥 Competition Video
Demo Video
This project aims to solve the issue of limited medical resources for stroke patients by enabling effective, unsupervised home rehabilitation training. It also demonstrates a full-stack integration of low-power embedded systems, sensor fusion algorithms, and animational modeling to achieve autonomous rehabilitation assessment.