Participating again for the second year, we developed a self-balancing electric motorcycle that autonomously follows an electromagnetic track using self-designed magnetic sensors. Without the aid of a flywheel, the vehicle maintains stability through precise real-time control algorithms.
This project integrated a wide range of hardware and software technologies, including electromagnetic signal processing, advanced fuzzy PID algorithms, power management IC design, schematic and PCB design, and embedded system integration with MCU minimal circuit design, I²C/UART/SPI communication, and DMA-based data buffering.
🧠 Software Development
Implemented a Kalman filtering algorithm to estimate the motorcycle’s accurate tilt angle and attitude based on IMU sensor fusion.
Developed all control logic in C/C++, ensuring efficient real-time performance on the embedded MCU platform.
Designed a fuzzy PID control algorithm to handle the nonlinear coupling between tilt angle and steering dynamics, enhancing stability and responsiveness.
⚙️ Hardware and Mechanical Design
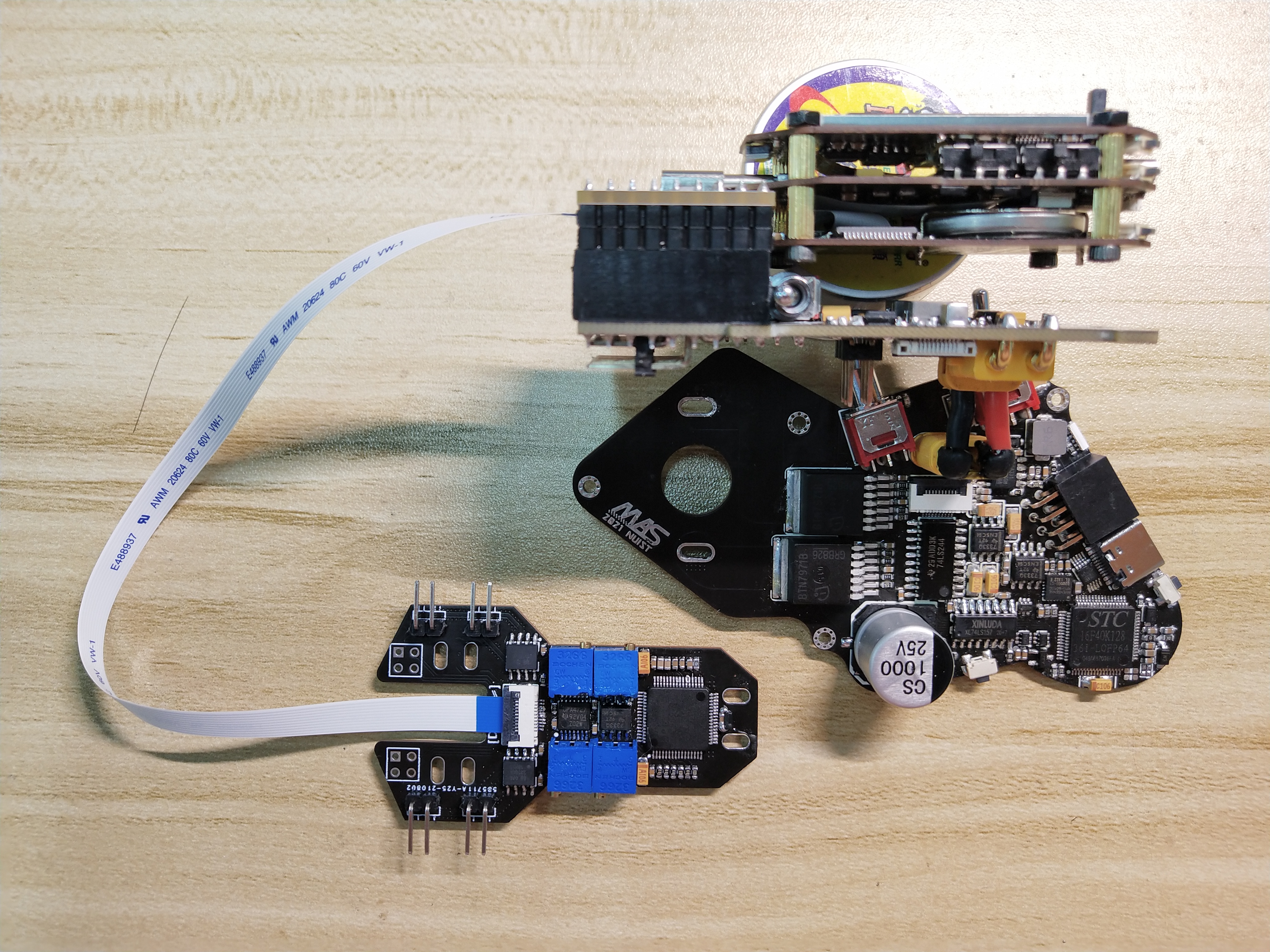
- Completed the mechanical structure design and 3D modeling of the vehicle, optimizing the self-balancing mechanism for a lightweight and compact structure. (See Below Picture)
- Designed multi-layer PCB boards integrating a minimal MCU control unit, MOSFET driver circuits, and multi-channel power management modules.
- Implemented analog–digital separation in the PCB design, isolating power and signal analog circuits from digital MCU sections to reduce interference and improve system stability.
💡 Competition-winning Features
Achieved an elegant and stable mechanical design, where precise weight distribution and a refined self-balancing structure significantly reduced the load of the balance control algorithm.
Designed a miniaturized PCB, effectively reducing overall vehicle weight and enhancing the system’s compactness and aesthetic integration.
📸 Project Gallery

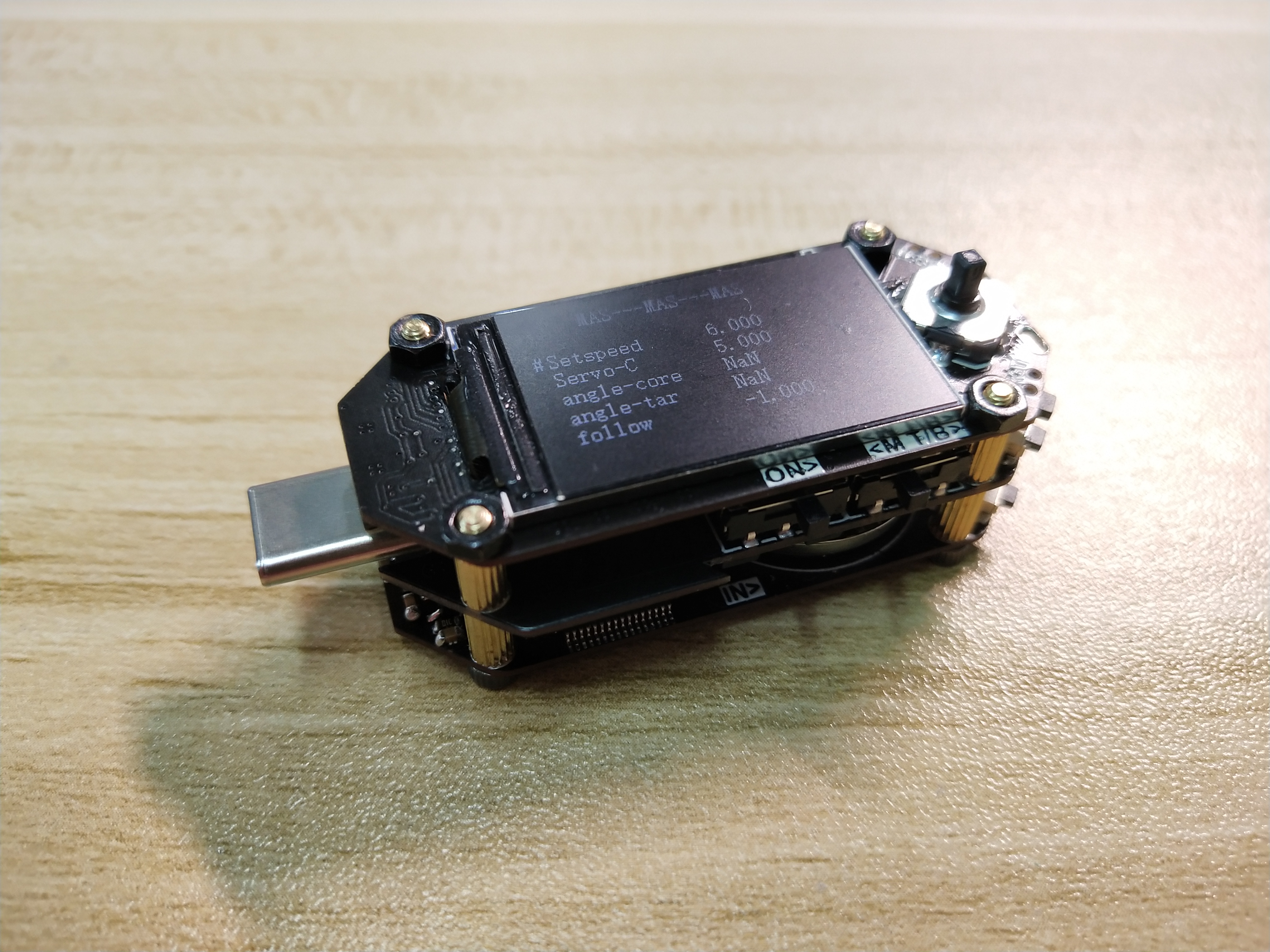
Overhead view of the our vehicle
🎥 Competition Video
🏆 National Finals
🏅 Team & Awards

Part of Team photo
🏆 First Prize in East China and National Second Prize Certificates 🏆
This project showcases a end-to-end embedded system design, including sensor fusion, real-time control, PCB design, and mechanical optimization, to achieve stable self-balancing and autonomous track following.