We designed and built a Mecanum-wheeled smart vehicle capable of rapidly locating and autonomously positioning an acoustic beacon.
The project integrated multiple hardware and software technologies, covering signal processing, control algorithms, embedded system design, and mechanical optimization.
🧠 Software Development
- Implemented a multi-modal perception and control system, including PID closed-loop control and Kalman filtering for optimized attitude estimation and speed control.
- Developed the main control logic in C/C++, supporting real-time algorithm debugging and optimization.
- Integrated an OpenMV (Python) module for visual-assisted navigation, achieving object recognition and localization.
- Applied FFT and cross-correlation algorithms for sound source localization, estimating direction by analyzing phase differences across a multi-microphone array.
- Independently implemented a gcc-path-based path planning algorithm, improving trajectory tracking and obstacle avoidance efficiency.
⚙️ Hardware and Mechanical Design
- Completed the mechanical structure design and modeling of the entire vehicle, optimizing Mecanum wheel drive and chassis stability.
- Designed multi-layer PCB boards integrating a minimal MCU control unit, MOSFET driver circuits, and multi-channel power management modules.
- Implemented high-speed signal shielding and protection circuits to ensure stable operation under complex electromagnetic conditions.
- Utilized an IMU sensor and microphone array for multi-source data fusion, enabling high-precision sound localization and motion control.
💡 Competition-winning Features
- The system employed Dual MCU parallel computation. One was dedicated to vehicle control and the other to signal acquisition and processing. This separation significantly improved system responsiveness and computational efficiency.
- We dedicated and integrated a specialized 8-bit parallel ADC chip for high-speed, high-precision data sampling, substantially improving signal accuracy compared to serial ADC solutions.
- Introduce path prediction and dynamic obstacle avoidance algorithms for more intelligent navigation.
📸 Project Gallery
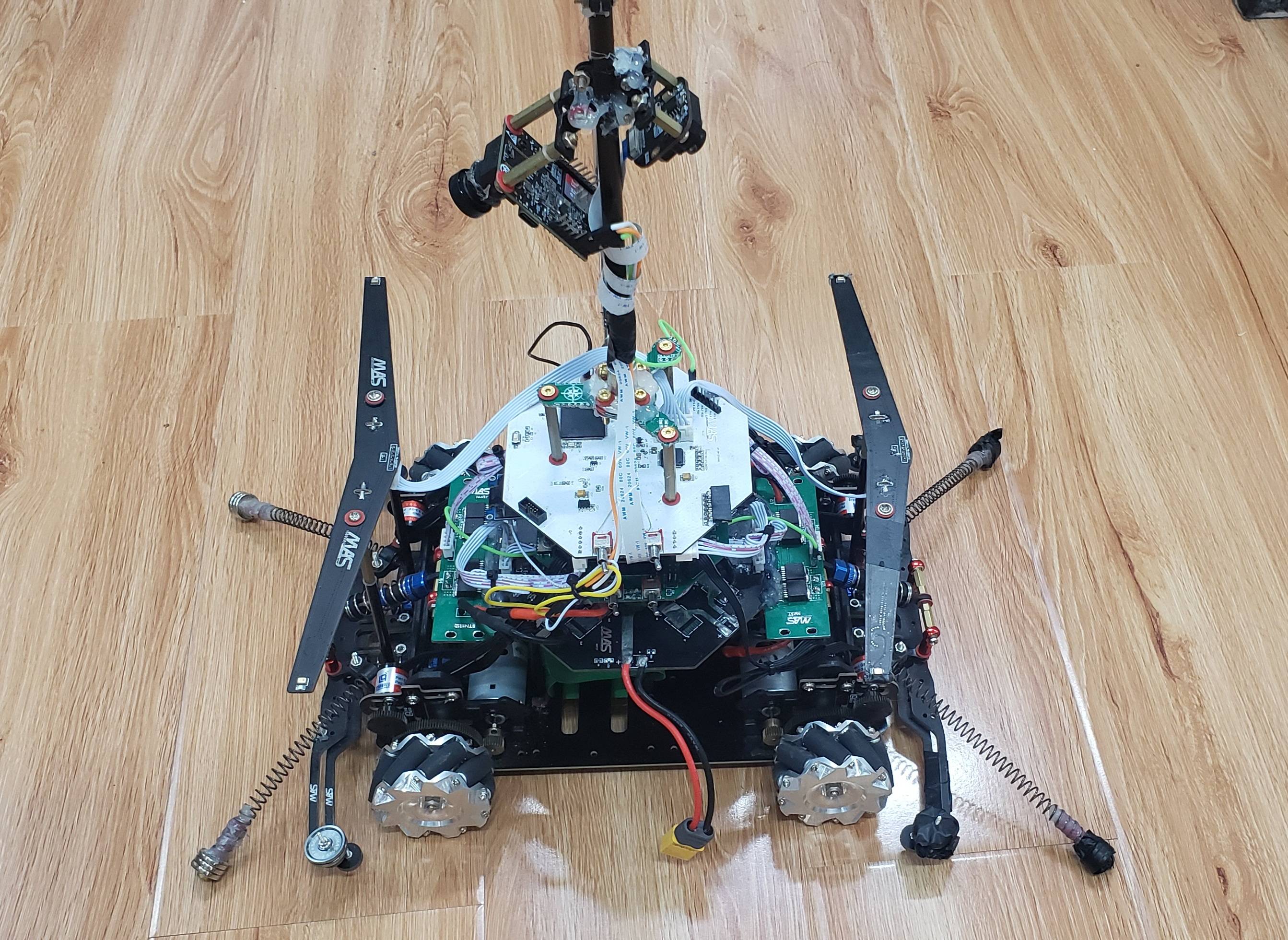
Overhead view of the our vehicle
🎥 Competition Video
🏆 National Finals
🏅 Team & Awards
Part of Team photo
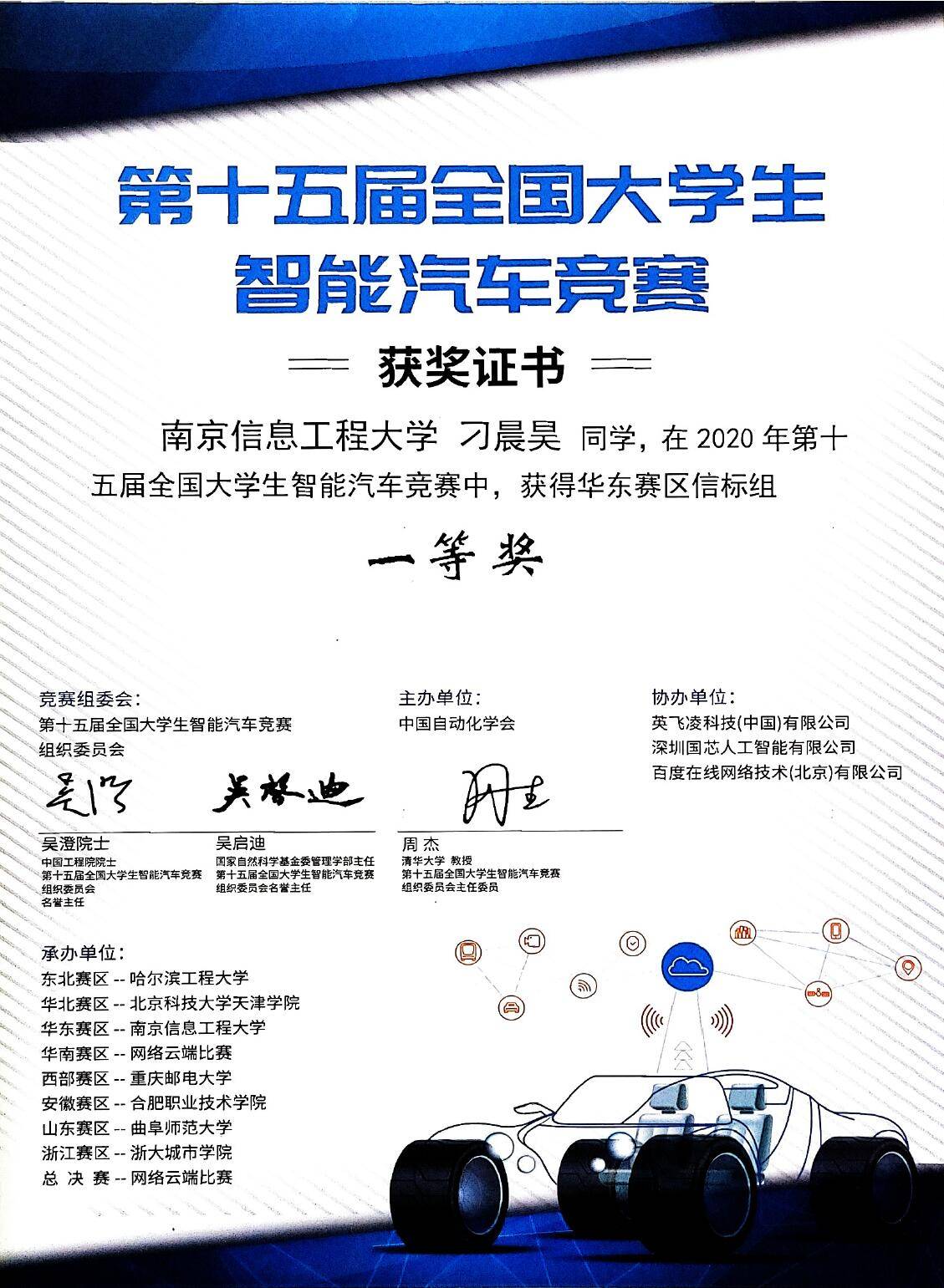
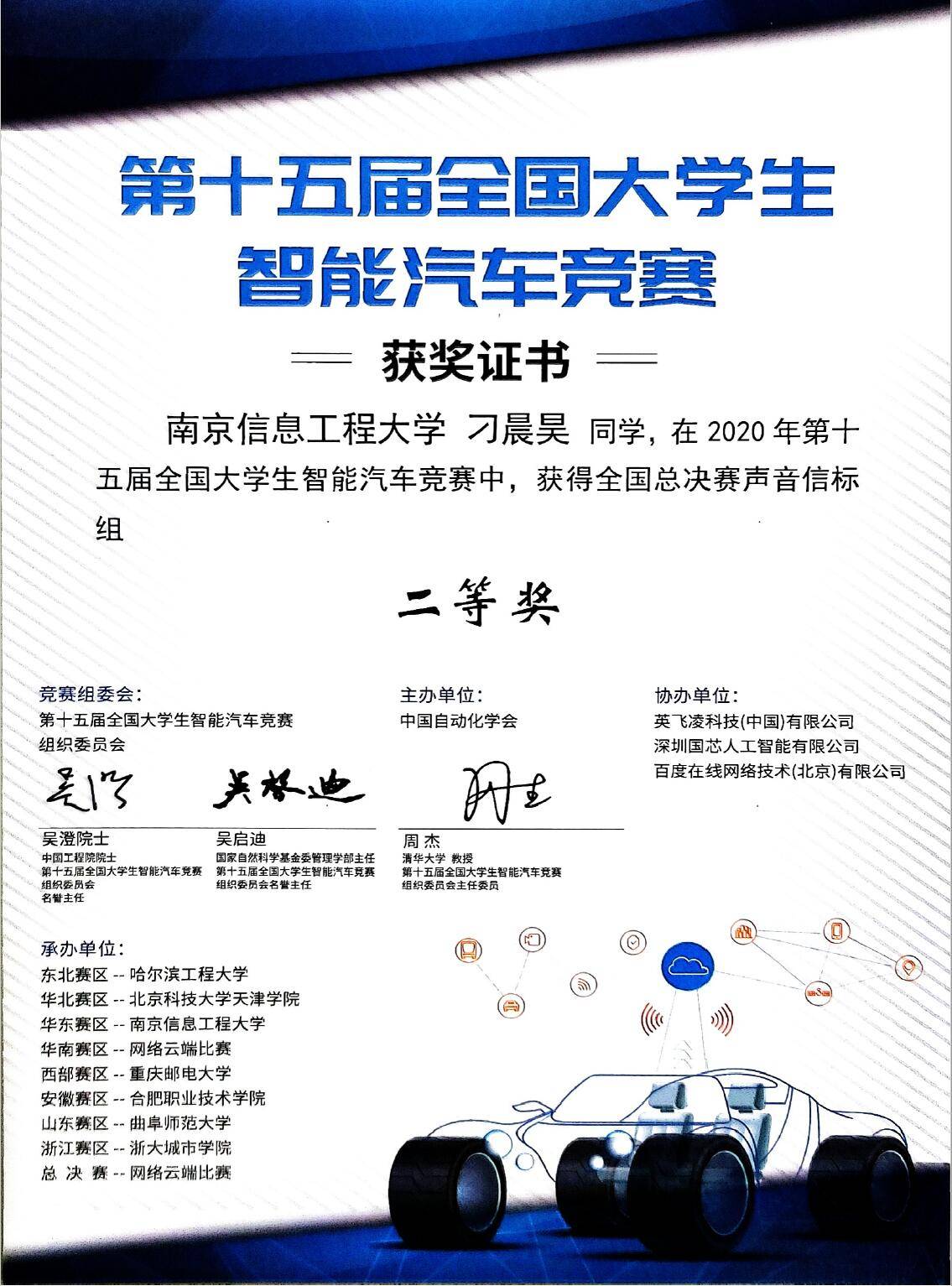
🏆 First Prize in East China and National Second Prize Certificates 🏆
This project demonstrates a full-stack integration of embedded systems, perception algorithms, and mechanical design to achieve autonomous sound source localization.