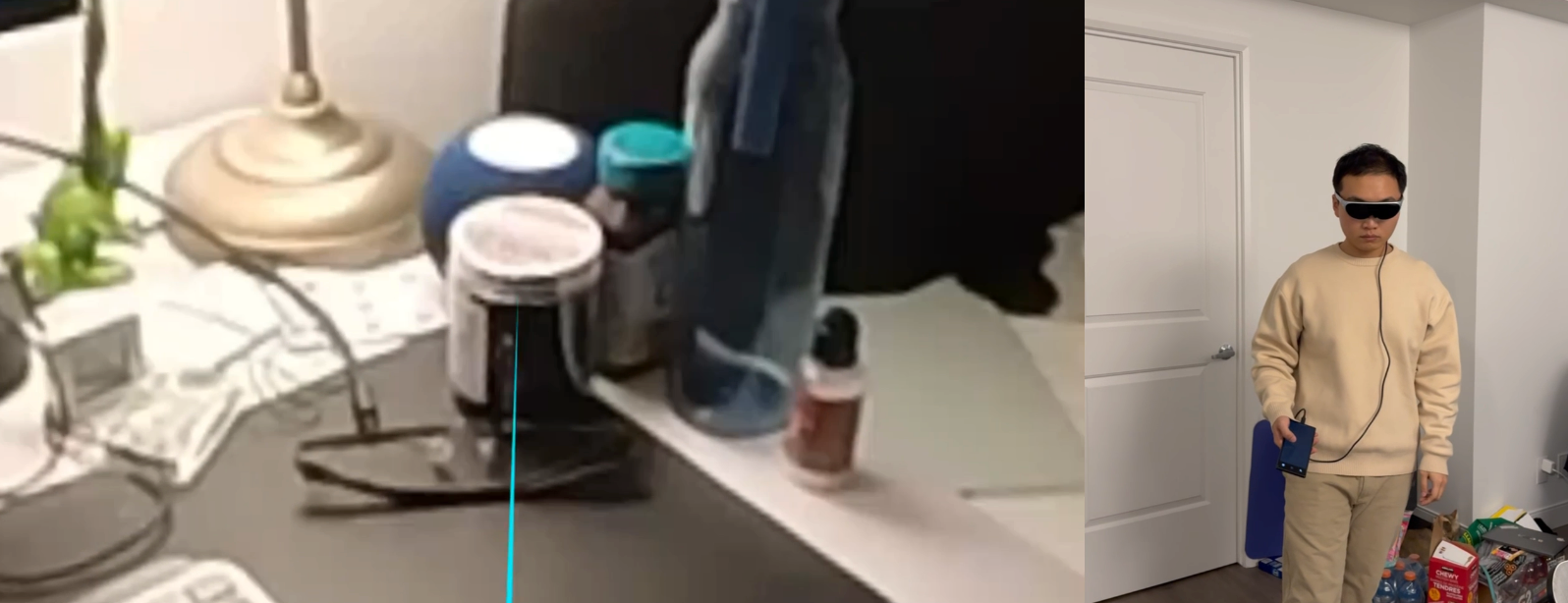
This is my M.Eng. master project. I built an AR panoramic video calling system that enhances an “immersive calling” experience: users can wear Rokid Air AR glasses and look around a remote environment in 360°, as if stepping into the other person’s room. 🤩